

Vehicle Dynamics Modeling
Ride comfort and handling are two critical considerations in vehicle design. Suspension design, tires and weight distribution play a major role in defining how a vehicle responds to both road and driver inputs. I explored transient vehicle models to study the dependence of ride and handling performance on design parameters, inform vehicle optimization, and assess stability and natural frequencies.
The behavior of a vehicle on a roadway can be characterized by vehicle dynamics models, which capture the response of a vehicle to road and steering inputs. Changes in the road topography and the driver’s steering maneuvers will cause mechanical interactions between the road, tires, wheel uprights, steering mechanism, suspension system, and the chassis of the vehicle. Each of these interactions plays a critical role in characterizing a vehicle’s overall ride and handling performance.
To track the dynamic behavior of the vehicle, a coordinate system must be assigned to the vehicle. The diagram below details the standard coordinate system orientation used in the models contained in this report. Here the downwards is the +Z direction, the +Y direction is towards the right side, and +X is in the direction that the vehicle is facing. Rotations about this coordinate system are denoted as the yaw angle (ψ), pitch angle (θ), and the roll angle (φ). These angles are critical for identifying weight transfer in the lateral and longitudinal directions, as well as the changes in the direction of vehicle heading.

Suspension design plays a critical role in ride and handling of a vehicle, with the ability to tune the response of the system to address different road and steering inputs. Below are a few different models that are commonly used to understand the response modes associated with passenger vehicles. Click on the tabs to get a breakdown of each model.
Ride Models
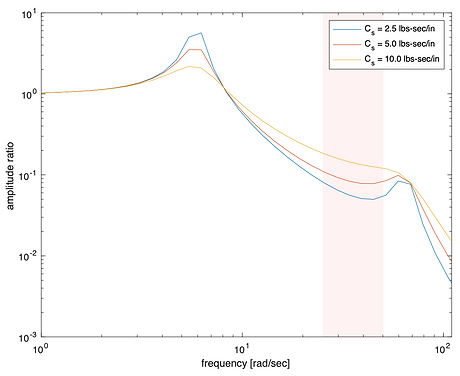
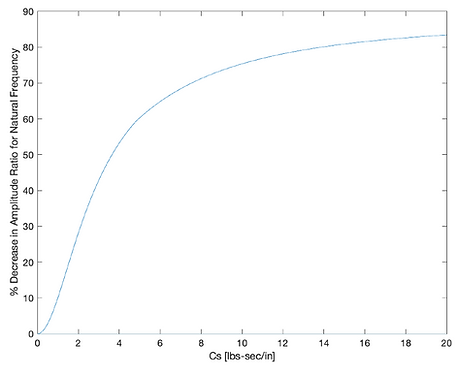
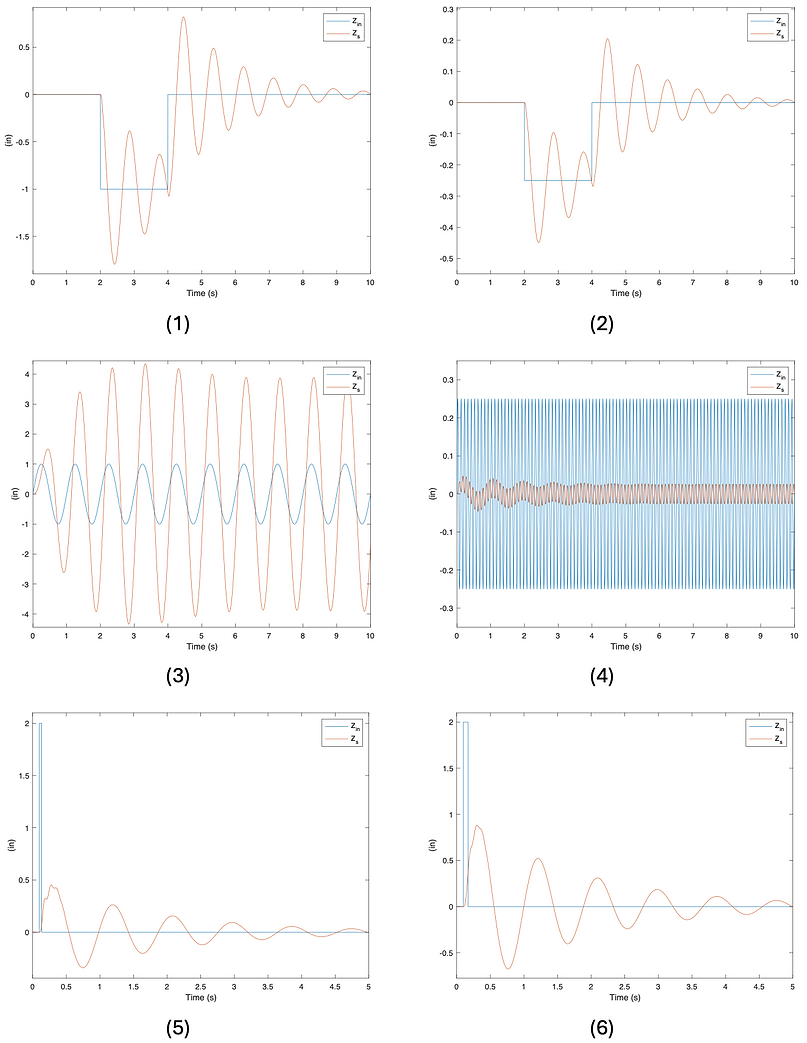
The ride characteristics of a consumer vehicle strongly influence the passenger experience. A vehicle can be represented by a system of springs, dampers and masses, to better understand the associated natural frequencies and transient responses to different road inputs. Experimental studies have shown that frequencies between 4 to 8 Hz can create the greatest discomfort for drivers and passengers, making it critical to identify the road-induced frequencies within this range that could excite the suspension system [1]. Two different ride models, a quarter car model, and a pitch-plane model are used to analyze the vehicle responses to vertical road inputs. The quarter car model analyzes the motion of a single wheel, representing a quarter of the full vehicle system, while accounting for a quarter of the sprung mass (chassis and body weight) and the unsprung mass (wheel assembly). The pitch-plane model captures the heave and pitch motion responses of the vehicle by considering the front and rear suspension assemblies along with key chassis parameters including sprung mass, the location of the center of gravity, and pitch moment of inertia. This model can also be extended to a half car model that includes the tire stiffness and damping, suspension damping, and the unsprung masses (front and rear axle weights).
























Handling Models
Vehicle handling characteristics play a critical role in a driver’s control over the vehicle. When a driver provides a steering input through the handwheel (steering wheel), the direction that the tires are pointing differs from the vehicle heading, introducing a tire slip angle. The resulting tire deformation generates lateral cornering forces at the tire contact patches. This occurs at both the front and rear tires, contributing to a net yaw moment that influences the vehicles direction of heading. The yaw rate model is built upon the classic bicycle model force diagram to capture the yaw rate and drift angle response of a vehicle during a handling maneuver. The model accounts for the yaw moment of inertia, wheelbase, center of mass, vehicle mass, and cornering stiffness of the tires. This model was extended to include roll dynamics, incorporating the roll moment of inertia, roll stiffness, roll damping, and non-linear tire behavior that arise from weight transfer across an axle. Lastly, a simplified steering compliance model was developed to examine how resisting moments at the tire contact patches, torsional compliance of the steering column, and steering system geometry affect the vehicle response to a handwheel input.